Ejemplo en Python |
|||||||||||||||||||||
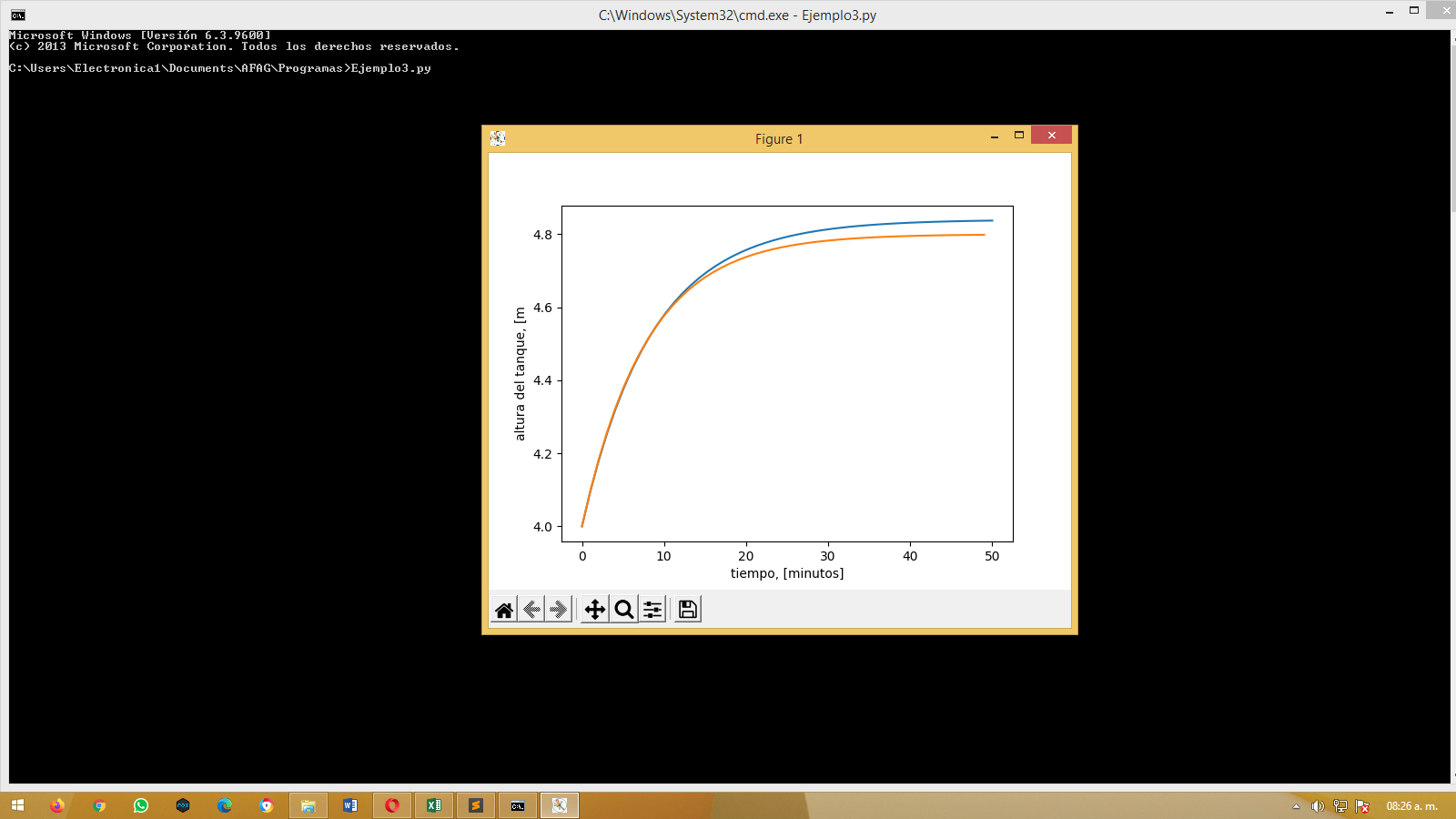
DescripciónSimulación de un tanque de sistema dinámico usando Python Requisitos de EjecuciónPara la ejecución de este código es necesario instalar lo siguiente:
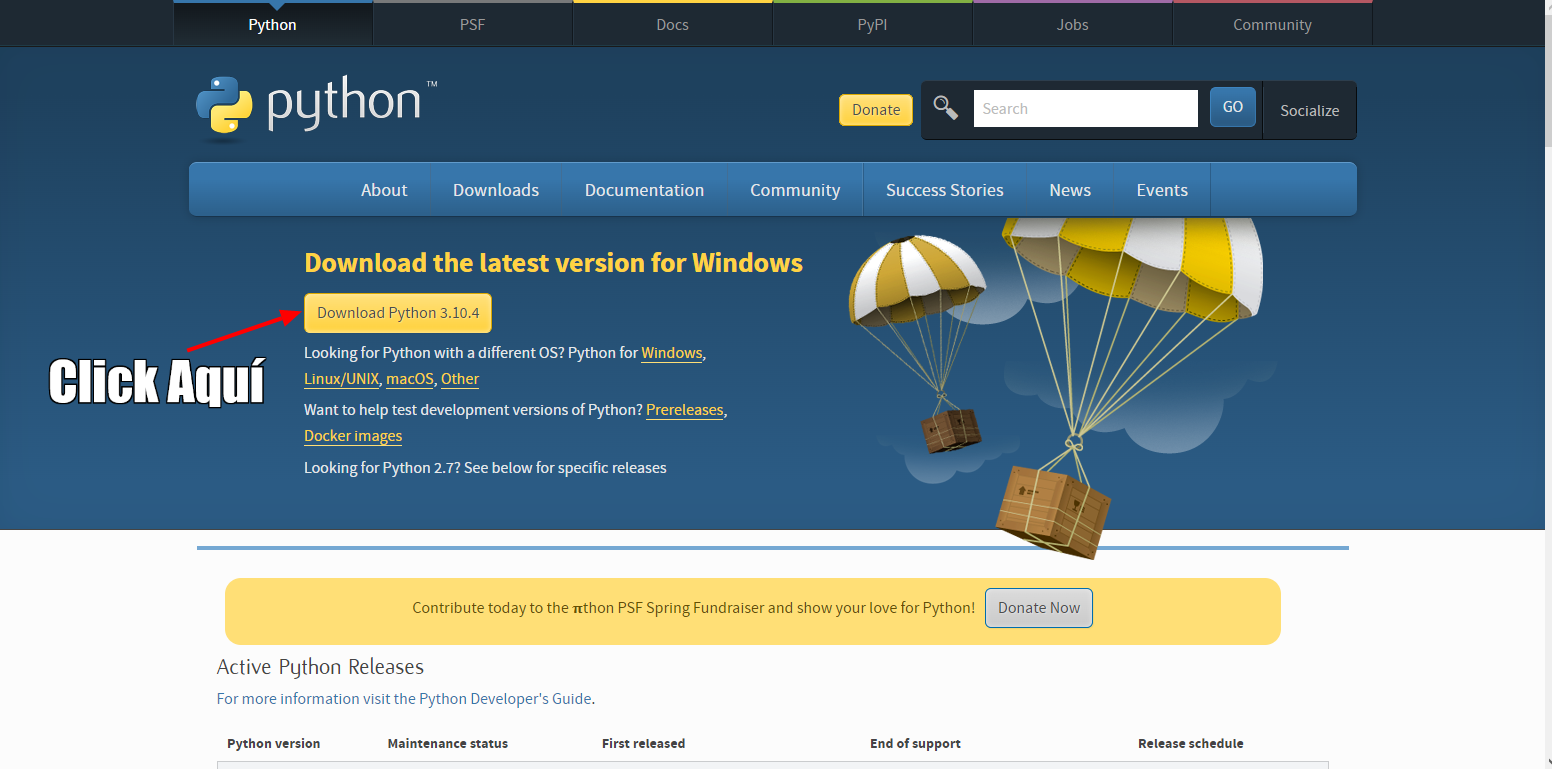
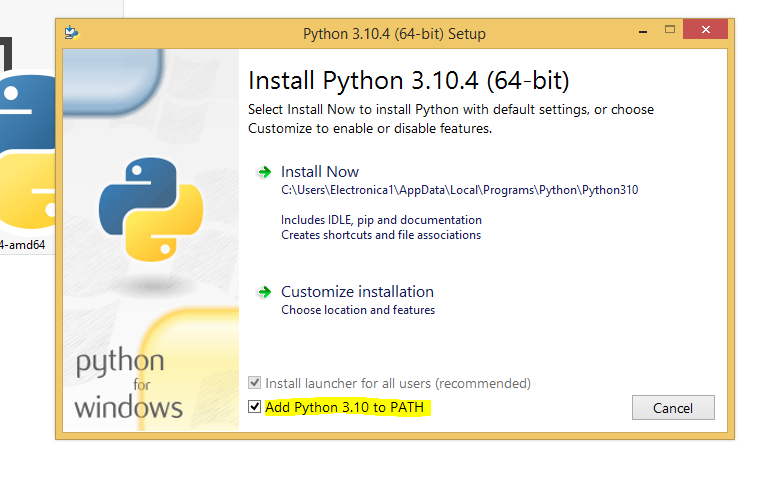
Instalando Python
Instalando LibreríasLas librerías necesarias para la ejecución de este código son las siguientes:
Codificación
Ejecución
|
|||||||||||||||||||||
|
|
|||||||||||||||||||||
|
|
Control Óptimo
Ejemplo 3
Obra publicada con Licencia Creative Commons Reconocimiento Compartir igual 4.0