Tarea
1.-Identificación.

2.-Objetivo.
|
El alumno podrá implementar un control óptimo de horizonte infinito sobre un sistema físico y comprobará sus características de estabilidad asintótica. |
3.-Marco Teórico.
|
El desarrollo del marco teórico será dado en el aula por el profesor. El profesor deberá cubrir los siguientes aspectos:
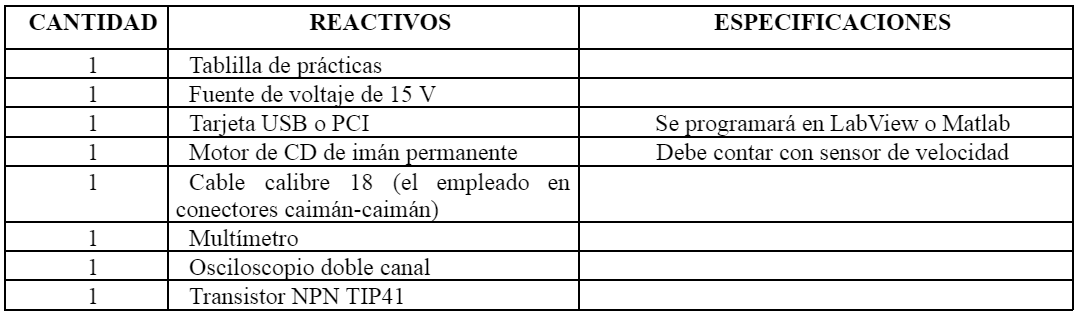
Tarjetas de adquisición recomendadas: USB 6008-09 o PCI. |
4.- Medidas de Seguridad.
|
5.- Reactivos/insumos, materiales/utensilios y equipos.
6.-Procedimiento Para el Desarrollo de la Práctica.
|
1. Identifique mediante la respuesta al escalón el modelo lineal del motor de CD de imán permanente. 2. Dado un índice de desempeño, calcule un control óptimo para tareas de regulación y estabilización del motor de CD, haciendo uso del modelo identificado en el paso anterior. Calcule las locaciones óptimas de los polos en lazo cerrado para cada elección de Q y R. 3. Implemente el control óptimo en Labview y construya un seguidor de voltaje con el TIP 41. No olvide compensar en el programa del controlador la caída de voltaje del seguidor y la zona muerta del motor de CD. 4. La interfaz con el usuario deberá tener la facilidad de reprogramar Q y R además de la referencia en RPM del motor de CD. 5. Realice un frenado dinámico del motor de CD, a velocidad constante invirtiendo el signo de la señal de control. Haga una comparación de tiempos empleados por el motor en parar sin frenado dinámico y con frenado dinámico. |
7.-Cuestionario.
|
1.- ¿Por qué en el caso de horizonte infinito es posible incluir el concepto de estabilidad? Conclusiones: Las anotaciones concluyentes serán realizadas individualmente por los alumnos en el reporte final. |
8.-Bibliografía.
|